Simulating Real-Time Soft Body Mechanics: A New Era in Physics-Based Animation
In the fast-evolving field of computer graphics and soft body simulation, one of the great miracles of modern science is the ability to model the behavior of elastic bodies in real-time. Advances in these techniques, as demonstrated through recent breakthroughs, redefine what is possible in both academic research and practical applications. What used to be computationally impossible—calculating millions of interactions between soft bodies—can now be achieved with astonishing speed and accuracy, thanks to the latest innovations in computational methods.
For example, imagine filling a teapot with tumultuous, squishy soft bodies that collide and interact with each other. The computational complexity here is immense. You’re essentially calculating millions of interactions as these objects bend, compress, and rebound off each other. While it might sound like a nightmare to model, modern techniques have made this simulation not only possible but also incredibly efficient. As someone who’s worked extensively on AI and machine learning models, I’m always impressed by how much these advancements share with AI-driven optimizations I’ve explored in fields like process automation and cloud solutions.
< >
>
The Complexity of Soft Body Interactions
The true test of a soft body simulation comes when you introduce organic shapes into the mix—let’s say octopi or armadillo models. These creatures have not only highly flexible, elastic forms but also hundreds or thousands of individual points of interaction. Each tentacle of an octopus, for example, models sophisticated collisions with itself and the surrounding environment. This is what makes simulations like this an absolute triumph of physics-based computation. The interactions ripple through the bodies in wave-like patterns, which would traditionally cause older simulators to collapse under the weight of these complex constraints. However, newer methods keep these models stable regardless of how intensely the objects interact.
A clear example of this technological prowess is the feedback loop created by pressing these simulated bodies against a solid surface, like glass. The way pressure propagates through the model, bending and reshaping the object while maintaining its realistic elasticity, displays the kind of accuracy that wasn’t feasible even a decade ago. This achievement is reminiscent of some of the futuristic problem-solving approaches I’ve explored in applications like machine learning models and AI-driven automation, where optimizing for extremely complex interactions defines success.
<
>
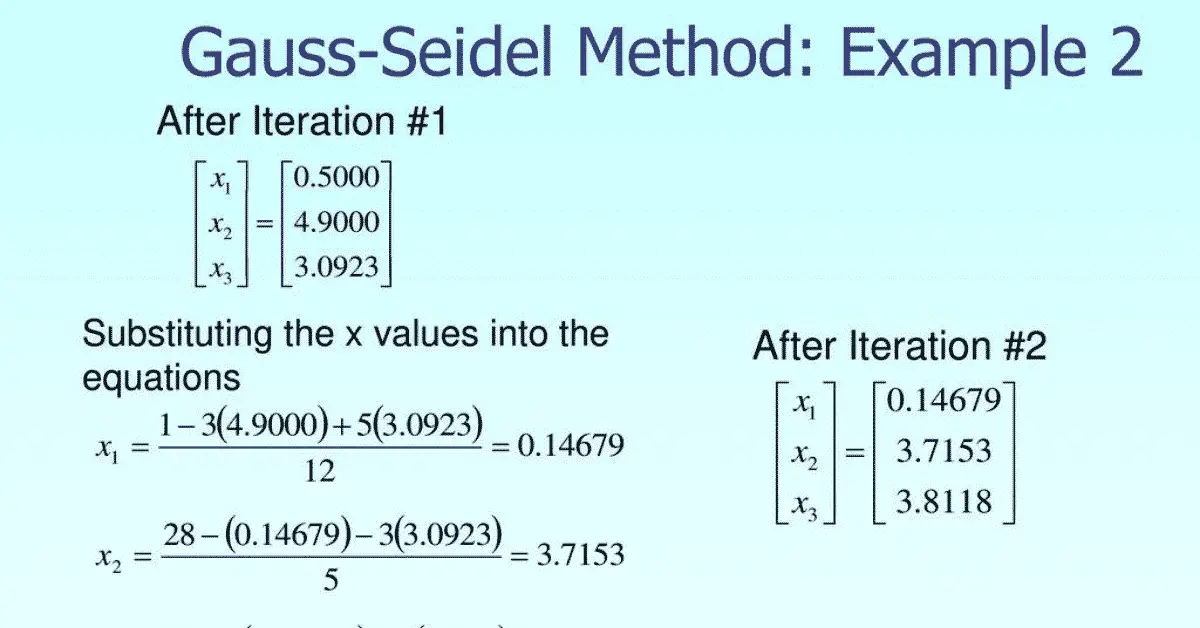
The Technology Behind the Magic: Gauss-Seidel Iterations
What’s going on under the hood of these computational models? One of the key innovations that makes this feasible is the use of Gauss-Seidel iterations. If that sounds complex, it’s because it is. Gauss-Seidel methods are a staple in numerical analysis, offering an iterative solution to linear systems that breaks down a large problem into smaller, more manageable pieces. In the context of soft body simulations, this allows us to model each elastic component separately and then integrate these partial solutions into a coherent whole.
This is akin to optimizing large-scale distributed systems in cloud computing, such as orchestrating microservices in a containerized application. Just as AWS and other cloud technologies are geared toward breaking one large application into smaller, independently manageable components, so too does this method revolutionize soft-body simulations by isolating individual points of elasticity for separate calculations. When I worked at Microsoft, one of the challenges we faced was managing these individual micro-interactions such that computational resources could be utilized efficiently without compromising on stability—a similar problem exists in these simulations.
< >
>
The Miraculous Speed: Up to 1000x Faster
One of the most astonishing outcomes of this technological leap is the incredible processing speed. We’re not looking at marginal improvements over previous models. No, what we’re seeing is logarithmic performance scaling: up to 1000 times faster than older methods. This means what used to take hours or even days to simulate can now be accomplished in mere seconds per frame.
This breakthrough feels parallel to advancements in AI, where models that used to require significant computational power can now be run on lightweight, distributed systems due to advancements in optimization algorithms. Just as I noted in my previous posts on elastic body simulations, this kind of improvement doesn’t just enhance the speed and efficiency of physics-based animations—it opens up entirely new possibilities for applications that were impossible before. Similar to how cutting-edge AI models like GPT-4.x are transforming the realm of process automation and natural language processing, these simulation improvements are revolutionizing fields from video game design to real-world applications like engineering and biology.
Think of it this way—if we analogize a simulated teapot filled with elastic bodies to a real-world environment like an airport filled with a million people, the complexity of modeling such interactions is staggering. Yet, these technologies are making it not only possible but also highly efficient. With earlier approaches, simulations would break down under the strain of so many interacting vertices and tetrahedra. Now, with significantly faster and more stable simulation methods, we can push the limits of realism and responsiveness.
< >
>
Applications Beyond Graphics
While this may seem niche, the applications of real-time soft body simulations go well beyond entertainment and gaming. For instance, in designing vehicles, you might want to simulate how long-term pressure impacts the structural integrity of the materials used in car interiors without running extensive physical tests. I’ve been continuously fascinated by the relationship between simulations and physical-world engineering as I tinkered with automotive design and testing in my younger years.
There’s also a completely different yet equally fascinating avenue for this technology: medical simulations. Surgeons could potentially test procedures on simulated organs that behave like real elastic tissues. Such medical training tools could one day reduce the risk of complications in complex surgeries.
<
>
Conclusion
We are witnessing a new frontier in computing and physics-based simulations, where the ability to model complex, real-world interactions has advanced by leaps and bounds. This technology opens up doors in numerous fields, far beyond its obvious applications in entertainment. Just as the advancements in elastic body simulations impressed in the past, these latest innovations are pushing us ever closer to real-time, accurate, and reliable simulations of our physical world. I’m reminded of the times I’ve worked on machine learning algorithms designed to simulate human-like decision-making; the parallels between real-world optimization and soft body interaction are striking.
With that kind of computational power at our disposal, who knows what the future holds? One thing is for sure: it’s an exciting time to be part of this rapidly evolving field.
Focus Keyphrase: Real-time soft body simulation